En esta ocasion vamos a mover un cubo que esta en Unity 3D por medio del Arduino Uno.
Procedimiento:
1.-Hacemos el programa del Arduino Uno,que consiste en leer el estado de un pulso externo(Button).
y enviarlo por medio de la comunicacion serial RS232 a la PC.
codigo del Arduino:
/***************************************************************/ const int buttonPin = 2; // the number of the pushbutton pin const int ledPin = 13; // the number of the LED pin // variables will change: int buttonState = 0; // variable for reading the pushbutton status void setup() { Serial.begin(9600);
// initialize the LED pin as an output: pinMode(ledPin, OUTPUT); // initialize the pushbutton pin as an input: pinMode(buttonPin, INPUT); } void loop() { // read the state of the pushbutton value: buttonState = digitalRead(buttonPin); // check if the pushbutton is pressed. If it is, the buttonState is HIGH: if (buttonState == HIGH) { // turn LED on: digitalWrite(ledPin, HIGH); Serial.println(buttonState);//Send '1' } else { // turn LED off: digitalWrite(ledPin, LOW); Serial.println(buttonState);//Send '0' } delay(150); } /**********************************************************/ Link-->Download_Arduino_Button /**********************************************************/
2.-Creamos el cubo en Unity 3D y activamos su comunicacion RS232 para poder leer los datos que son enviados desde el Arduino. Seleccionamos el COMx correspodiente al Arduino Uno.
Luego le damos al boton Start y nos saldra el mensaje de comenzar.
Programa del Unity 3D. /**********************************************************/ link-->Download_Cubo_Arduino /**********************************************************/
3.-Con cada pulso('1') que le realizamos al arduino(Button) el cubo se eleva.
La resistencia eléctrica es parte fundamental en la creación de circuitos, todas las resistencias pueden ser medidas y para esto se emplea un óhmetro o también conocido como ohmímetro.
¿Como funciona un Óhmetro?
Este dispositivo de medición emplea una batería en su interior con la cual se induce un voltaje a través de la resistencia que se desea medir, este proceso se hace para que posteriormente el galvanometro pueda medir la corriente que circula a través de la resistencia.
Despues de realizar el proceso anterior el Óhmetro puede calcular rápidamente la resistencia utilizando la ley de ohm, para ser más precisos se utiliza esta formula:
En donde:
R = Resistencia
V = Voltaje
I = Corriente
Recordemos que el Óhmetro posee una batería interna cuyo valor esta definido, con esto ya tenemos uno de los valores (V), posteriormente al inducir el voltaje sobre la resistencia a medir el instrumento calcula la corriente (I), al ya tener estos 2 valores el instrumento aplica la formula mostrada arriba y con esta puede determinar de que valor es la resistencia que se esta midiendo.
Para medir resistencia con el PIC utilizaremos la fórmula de un divisor de voltaje.
como observamos en la figura tenemos dos resistencias R1 y R2,entonces fijamos un valor de resistencia en este caso R2,le damos un valor fijo de 1K.luego tenemos q reemplazar y despejar.
Los sensores de distancia permiten medir una longitud desde el punto de ubicación del sensor
hasta un obstáculo puesto en un punto dentro del rango de trabajo del sensor. La implementación
de este tipo de dispositivos es de utilidad en sistemas de control, y en proyectos de robótica. Para
el caso puntual de este capítulo se trabajará con el sensor GP2D12, este dispositivo usa como
estrategia de medida un rayo de luz infrarroja y su reflejo para determinar la longitud.La
apariencia física la distribución de pines y la vista en el simulador ISIS del sensor son los
siguientes:
Este tipo de sensores cuentan con un comportamiento no lineal, esto quiere decir que la salida no
obedece a una función de transferencia lineal. Para comprender de forma clara este concepto se
puede observar y analizar la siguiente gráfica que muestra el comportamiento de la salida en
función de la distancia:
Este comportamiento en un sensor es de difícil aplicación, dado que en algunos casos los
fabricantes no entregan una función de transferencia útil de tal forma que pueda ser usada en una
sola ecuación. Sin embargo no es un obstáculo para el uso del sensor. Como se puede apreciar en
la hoja técnica el rango de acción es de 10 a 80 centímetros tal como se puede apreciar en la
gráfica. La gráfica mostrada está contenida en la hoja técnica del dispositivo y está es realizada
experimentalmente. Para poder caracterizar el comportamiento del sensor y realizar una función
de transferencia es indispensable realizar un proceso matemático conocido como linealización.
Para este fin se hace una interpolación con una cantidad finita de puntos conocidos de la función,
estos puntos se toman de las medidas experimentales. Cuantos más puntos se evalúen más precisa
será la función de transferencia.
Para iniciar este proceso se escogen 2 puntos, que estén equitativamente distribuidos. Por ejemplo
el punto a 10cm, y 80cm. Para cada uno de los puntos se realiza una ecuación de orden igual al
número de puntos menos uno, en este caso serán ecuaciones de primer orden. Se asume como
variable independiente x los datos de entrada que en este caso son el voltaje de salida del sensor,
como variable dependiente y, la distancia en centímetros. Para comprender este concepto observe
la siguiente ecuación que representa el comportamiento exponencial del sensor:
y=A/x+B ; ecuacion12.11
Recordando que y, representa la distancia y que x, el voltaje de salida del sensor, se usan los datos
de dos puntos y se remplazan en las ecuaciones de la siguiente forma:
Tabla 12-3
Sistema de ecuaciones:
10=A/2.35 +B ;
80=A/0.41+B;
Sistema de ecuaciones con dos incógnitas.
Solucionando el sistema de ecuaciones se puede determinar que las constantes son:
A=34,76546392
B=-4,793814433
De está forma se puede formalizar la función de transferencia del sensor con la ecuación:
y=34,76546392/x + 4,793814433; Ecuación 12-14
Como la variable x representa el voltaje de salida del sensor y teniendo presente que el valor del
sensor no supera 2,5 voltios, la referencia del convertidor AD, se puede ajustar a 2,5 voltios. Para
estáblecer la conversión se puede usar la ecuación: (12.15)
Vadc =2,5Radc/1023 ; Ecuación 12-15
Remplazando la ecuación (12.15) en la ecuación (12.14), obtenemos la siguiente relación o
función de transferencia:
y=14226,02784/Radc - 4,793814433 ; Ecuación 12-16
El paso siguiente es implementar un código fuente que use la función de transferencia y que
posteriormente visualice el valor capturado.
Nota:Texto copiado del libro: Diseño y simulación de
sistemas
microcontrolados en
lenguaje C -Capitulo:12.3 Sensores de distancia- Pagina 134
Los estupendos microcontroladores dsPIC33F nos vuelven a sorprender con su módulo Timer, que incorpora hasta 9 Timer que pueden funcionar a 16 o 32 bits.
La serie de micros dsPIC33F dispone de 9 timers de 16 bits, de los cuales el Timer1 trabaja de manera individual, y el resto puede trabajar de forma individual o en parejas como Timer de 32 bits.
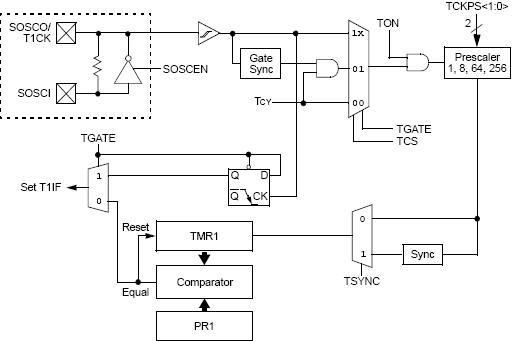
Timer1
El esquema del módulo Timer1 es el siguiente:
Como se puede observar en el gráfico, las características del Timer1 son:
Timer de 16 bits
Contador síncrono de 16 bits
Contador asíncrono de 16 bits
Acumulador de pulsos altos en TGate
Prescaler seleccionable en ratios 1:1, 1:8, 1:64 y 1:256
Ajuste fácil del Periodo con PR1
Además, nuestro Timer1 puede seguir funcionando incluso en el modo Idle o Sleep de la CPU.
El Timer1 puede acumular pulsos tanto externos (TCS=1) a través del pin T1CK como internos (TCS=0) al ritmo de la Frecuencia de instrucciones (Tcy). Además, en el modo de trabajo de acumulación de pulsos altos en TGate puede contar los pulsos internos (Tcy) sólo cuando el pin externo T1CK esté a nivel alto lo que permite contar la duración acumulada de una señal a nivel alto. Para seleccionar este modo hay que poner a 1 los bits TCS y TGATE.
El interruptor que nos permite encender y apagar el Timer1 es el bit TON.
A continuación nuestro tren de impulsos atraviesa el prescaler donde es dividido a razón de 1:1, 1:8, 1:64 y 1:256 en función de la combinación seleccionada en los bits TCKPS<1:0>.
A continuación se incrementa en una unidad el registro TMR1. En función del bit de configuración TSYNC, si su valor es 1 el incremento de dicho registro será sincronizado con una señal externa. Cada vez que se incrementa el registro TMR1, se compara con el registro PR1 y en caso de igualdad se pone a 0 el TMR1 y se señala el bit de interrupción T1IF. El registro PR1por defecto vale 0xFFFF con lo que el periodo del Timer1 será ese, pero podemos ajustarlo al valor que queramos, lo que nos permite seleccionar una frecuencia de interrupción programable muy útil.
Timer2/3, Timer 4/5, Timer 6/7 y Timer 8/9
Estos 8 timers pueden funcionar individualmente como timers de 16 bits o en parejas como timers de 32 bits. Su esquema es el siguiente:
Básicamente el funcionamiento de estos Timers a 16 bits es análogo al del Timer1, con excepciones que veremos más adelante0. Para hacerlos trabajar a 32 bits hay que poner a 1 el bit T32. En este caso, los bits de configuración del Timer de 32 bits serán los del Timer par; es decir, si queremos trabajar con la pareja Timer 4/5 hay que setear los bits del Timer4, incluyendo el bit T32=1.
Sin embargo, el bit de señalización de fin de periodo será el del Timer impar, en nuestro ejemplo se activará el bit T5IF.
En el modo de trabajo a 32 bits, la palabra alta la forma el registro TMR impar y la palabra baja el TMR par.
Las excepciones son las siguientes:
Sólo el Timer 2/3 puede servir como base de tiempos al módulo CCP (Capture and Output Compare)
Sólo el Timer 2/3 puede activar una transferencia de datos al módulo DMA
Sólo los Timer 2/3 y Timer 4/5 pueden activar el Trigger del ADC (1 y 2 respectivamente)
Registros
Los registros que utilizaremos para gestionar los Timer son los siguientes:
TMRx
PRx
TxCON
TON: enciende (1) o apaga (0) el timer
TSIDL: el Timer puede seguir trabajando (1) en modo Idle o Sleep o puede quedar parado (0).
TGATE: selecciona el modo de acumulación de pulso a nivel alto (1)
TKCPS: Prescaler, según los ratios 1:1 (00), 1:8 (01), 1:64 (10) o 1:256 (11).
TSYNC: Sincroniza entrada de clock externa (1)
TCS: Selecciona una fuente de clock externa (1) o la frecuencia interna de instrucciones (0).
T32 (sólo en Timer2/4/6/8): activa el modo de 32 bits (1)
IFS0
T1IF / T2IF / T3IF: se activan al finalizar el periodo del Timer.
IFS1
T4IF / T5IF: idem
IFS2
T6IF: idem
IFS3
T7IF / T8IF / T9IF: idem
Texto copiado de la pagina micropic.
-->http://www.micropic.es/mpblog/2007/02/dspic33f-capitulo-2-el-timer/ Example Code Timer32-DsPIC33FJ Freq -->Es la frecuencia de trabajo de su dspic en mi caso es de 40MIPS. Configuracion de registros. void config_TIMER32(void) { float time = 1000; //en milisegundos T3CONbits.TON = 0; //Stop any 16-bit Timer3 operation T2CONbits.TON = 0; //Stop any 16/32-bit Timer3 operation T2CONbits.T32 = 1; //Enable 32-bit Timer mode T2CONbits.TCS = 0; //Select internal instruction cycle clock T2CONbits.TGATE = 0; //Disable Gated Timer mode T2CONbits.TCKPS = 0b10; //Select 1:1 Prescaler Precontador (0 = 01:01, 1 = 01:08, 2 = 1:64, 3 = 1:256) long Time_Setup = (Freq / 64) * time;//Configuramos el tiempo deacuerdo al prescale. TMR3 = 0x00; //Clear 32-bit Timer (msw) TMR2 = 0x00; //Clear 32-bit Timer (lsw) PR3 = (Time_Setup / 1000) >> 16; //Load 32-bit period value (msw) PR2 = (Time_Setup / 1000) & 0xffff; //Load 32-bit period value (lsw) _T3IP = 0x01; //Set Timer Interrupt Priority Level - 7(highest) to 1(lowest) _T3IF = 0; //Clear Timer Interrupt Flag _T3IE = 1; //Enable Timer interrupt T2CONbits.TON = 1; //Start 32-bit Timer } Interrupcion del timer32. void __attribute__((interrupt, auto_psv)) _T3Interrupt(void) { _LATA0 = ~_LATA0; _T3IF = 0; //Clear interrupt flag }
Para los fines prácticos de este capítulo se trabajará con el sensor de presión MPX4115, este
sensor está caracterizado en Kilo Pascal, y permite medir presiones entre 15 y 115 KPa, o entre
2,18 y 16,7 psi. La apariencia física, la distribución de pines y la vista en ISIS, de este dispositivo
es la siguiente:
MPX4115 la función de transferencia
especificada por el fabricante es:Vout =Vs(0.009P- 0.095) donde:Vout :es la señal de salida del sensor. P :es la presion Vs: es el voltaje de alimentacion en este caso es de 5V.
Para calcular la presion debemos de despejar P.
nos queda :P=(111.111111Vout/Vs) +10.555555
El ADC de nuestro microcontrolador esta configurado con 10 bits de resolución se puede concluir
que:
Vout=5Radc/1024
Donde Radc es el el Buffer del ADC(ADC1BUF0).
Luego reemplazamos en P nos queda:
P=0.542535Radc/Vs +10.555555
pero Vs=5V
finalmente nos queda: P=0.108507Radc+10.555555
con esta ecuacion podemos hallar la presion en KiloPascal(KPa).
Obtenemos los datos de codigo G del programa ARCAM .
para poder controlar una CNC necesitamos extraer datos de X,Y,Z y F y enviarselos a un controlador como puede ser: PIC,DSPIC,AVR ARDUINO ETC mediante la comunicacion serial. para ello hemos desarrollado una interfaz en C# que realize ese trabajo.
modo de uso: En primer lugar buscamos el COM disponible para enviar datos, luego le damos click en el boton examinar para cargar el codigo G en .txt, despues se vera lleno los listbox con datos y tambien estara completado el dataGrid con todo la informacion del codigo G. para finalizar le damos click en el boton send step para enviar los datos de pasos interpretados a un controlador.
Uso de módulos a aprender: I/O,Timer,I2C,SPI,UART,QEI,PWM,INT,ADC,CCP.
SEMÁFORO MULTIPLEXADO CONTROLADO POR UN DSPIC
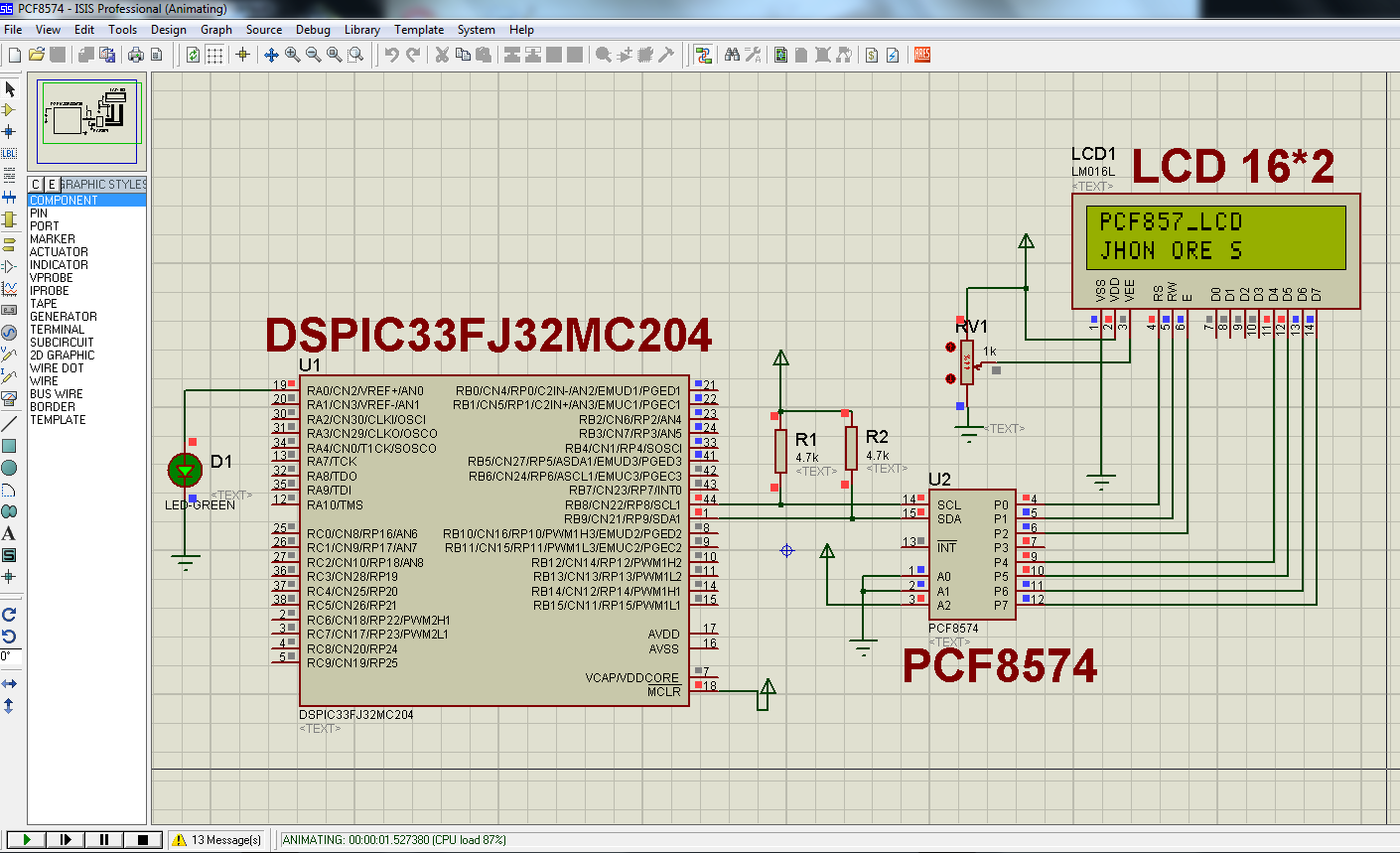
EXPANSOR PCF8574 CONTROLANDO LCD 16*2 POR MEDIO DE UN DSPIC.
El PCF8574 es un expansor de E/S compatible con la mayoría de microcontroladores, permite una comunicación bidireccional, necesitando para ello solo dos líneas a través del bus I2C.
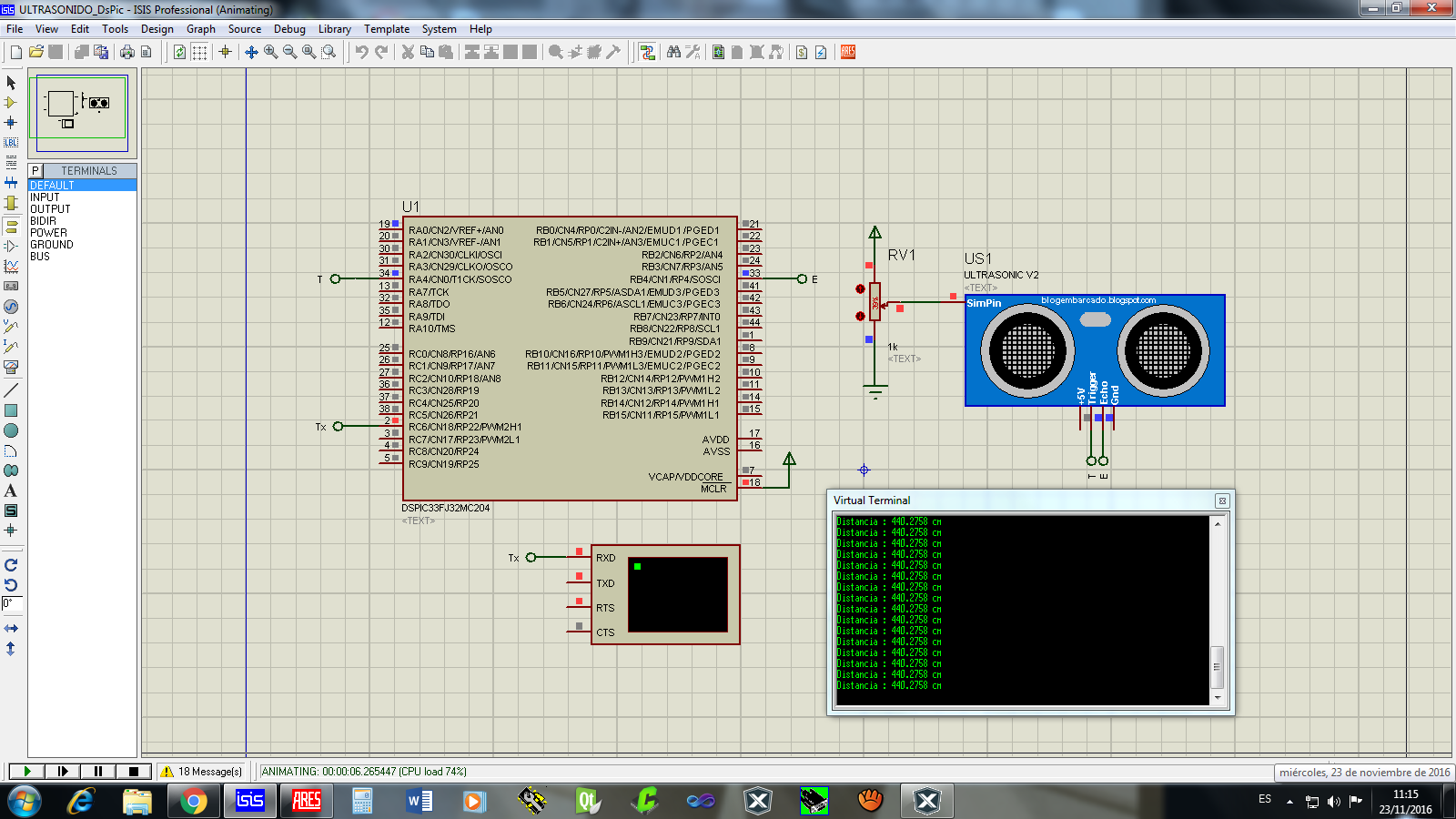
MEDIDOR DE DISTANCIA CON SENSOR ULTRASONIDO POR MEDIO DE UN DSPIC.
TECLADO MATRICIAL 4X4 UTILIZANDO UN PIN DEL DSPIC Y VISUALIZADO EN UN DISPLAY
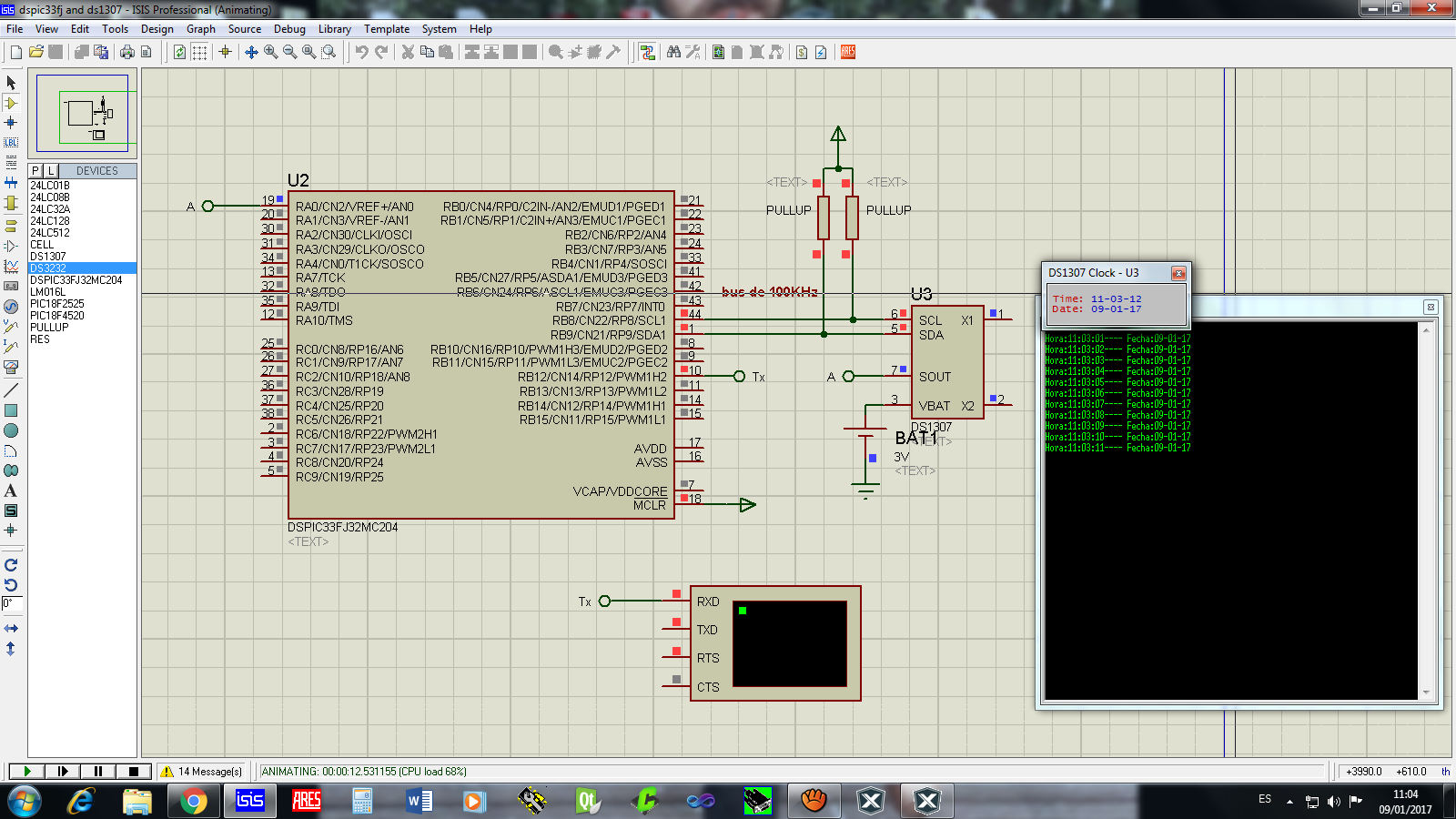
CONTROL DE UN RTC DS1307 POR MEDIO DE UN DSPIC
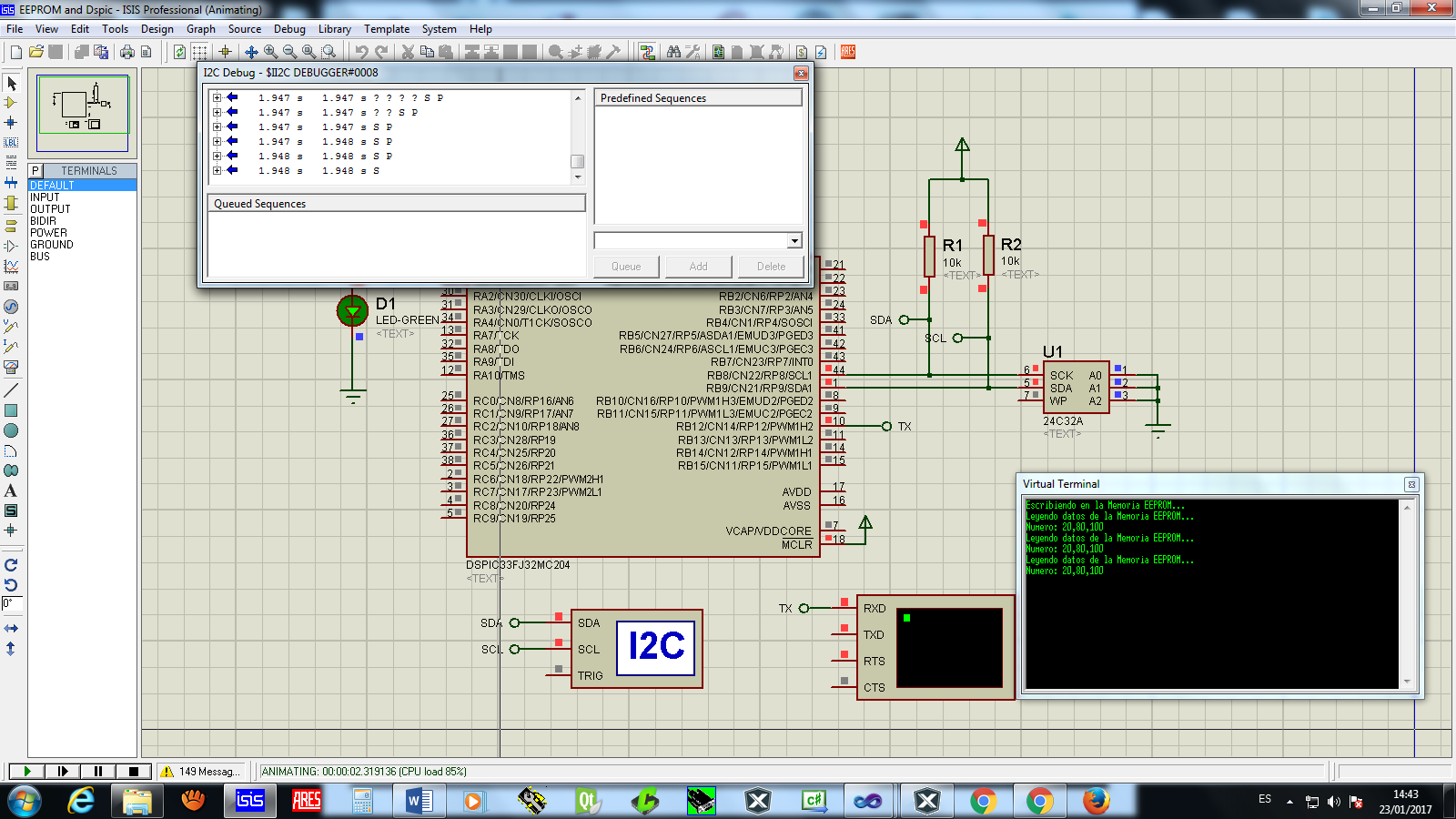
LECTURA Y ESCRITURA DE DATOS EN UNA MEMORIA EEPROM
ENVIO DE DATOS POR MEDIO DE BLUETOOTH HC-06 Y DSPIC.
LECTURA DE DATOS DEL GPS MEDIANTE DSPIC
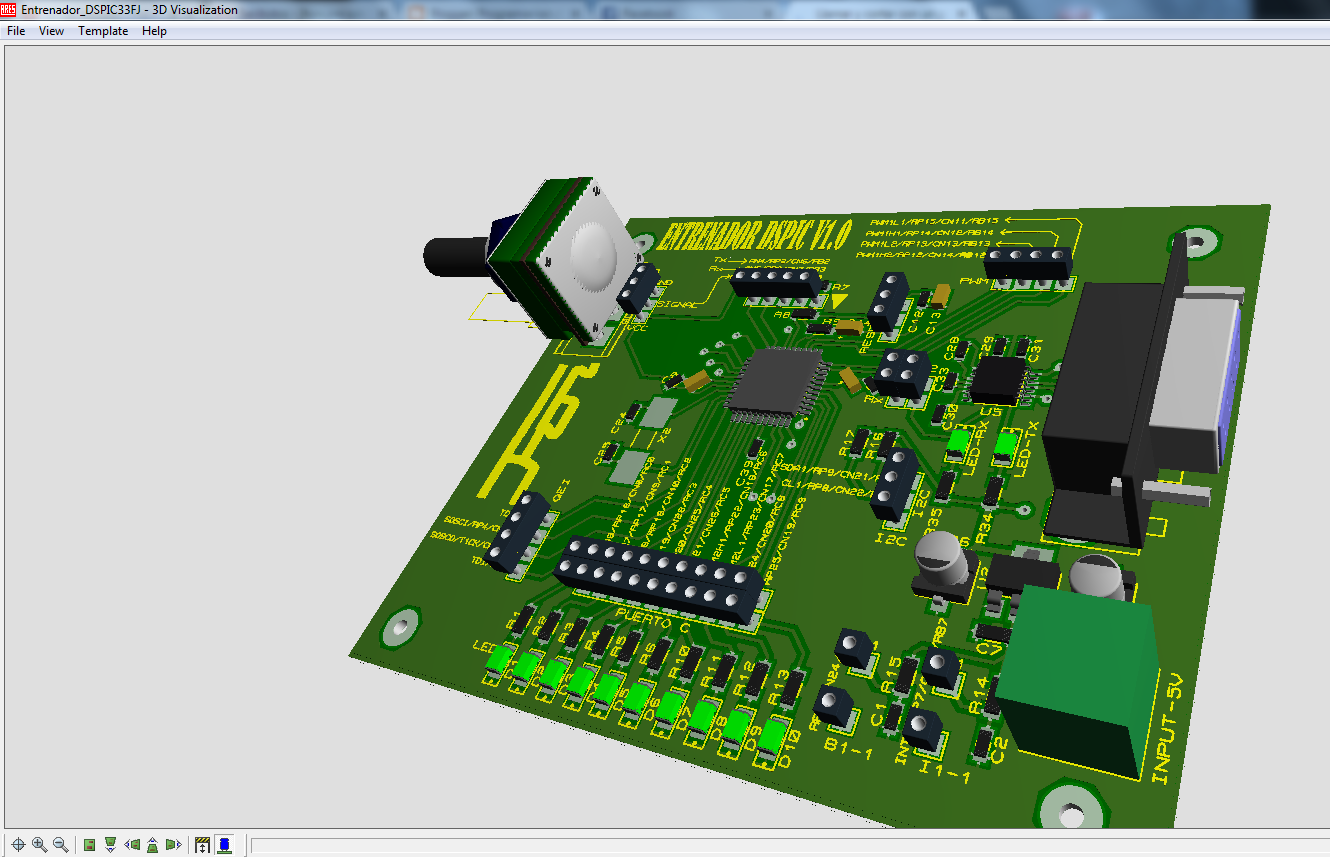
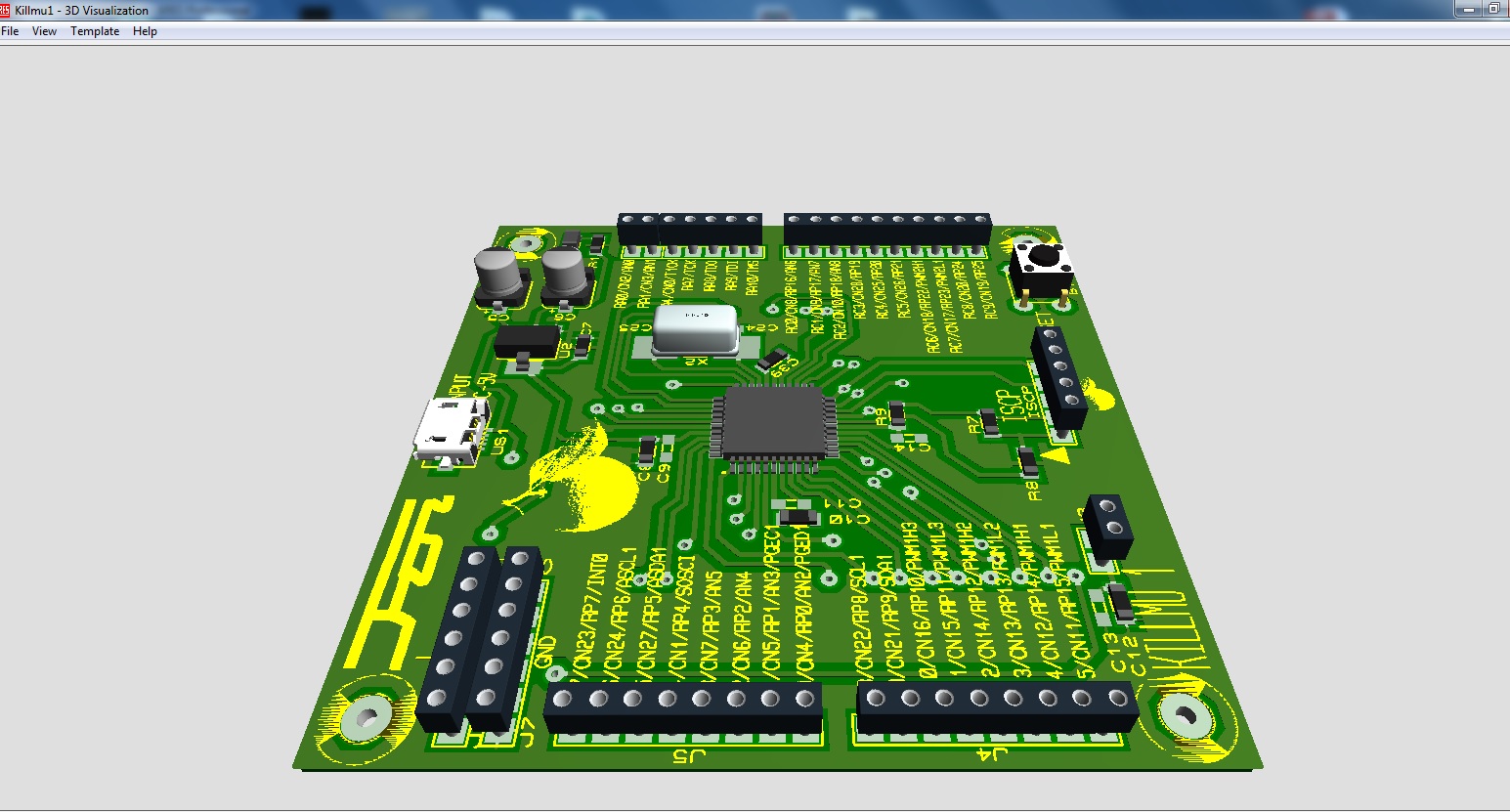
TARJETA ENTRENADORA DE DSPIC-KILLMU 1.
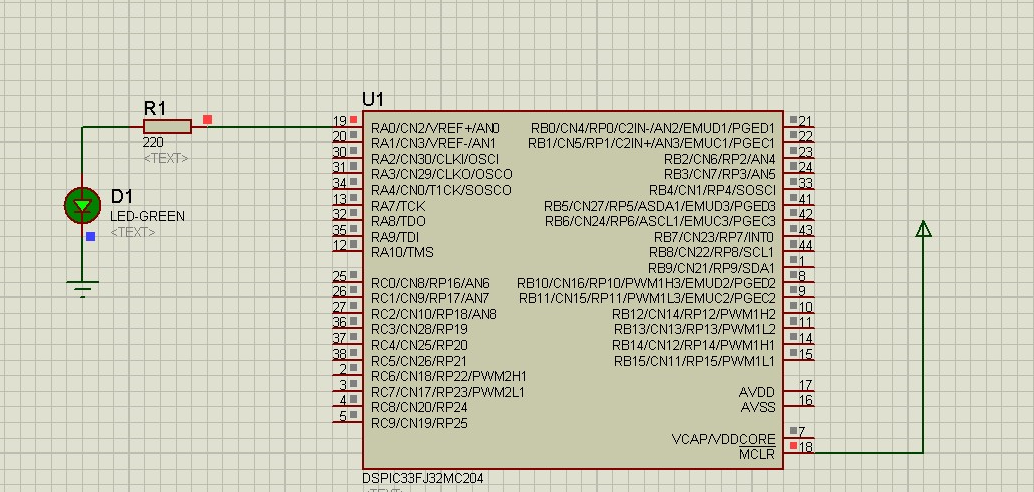
Se usa el modelo dspic33fj32mc204,este dspic se puede encontrar en proteus y simularlo,ademas cuenta con pines remapeables,tiene incorporada un DSP.
killmu 1 cuenta con todas las salidas de pines del dspic,con una alimenttacion de 5v con cable micro usb,con varias salidas de 5v y 3.3v.Tiene pines de ICSP para poder grabarlo con pickit3.
Saludos a todos los que están leyendo mi blog,en esta oportunidad compartiré con uds un tema fundamental,lo que es programación en microcontroladores de gama alta como son los de 16 bits.
vamos a trabajar con el modelo dspic33fj32mc204 ¿por que?
por que es el único modelo que se puede simular en proteus ,por esa razón lo estoy utilizando.
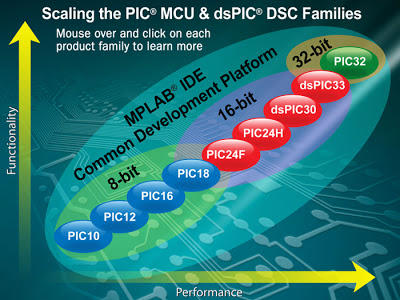
Los Un dsPIC es un [pequeño DSP + un PIC-MCU], entendiendo que su arquitectura es basada en la de un PIC®MCUs y que integra a la perfección las funciones del microcontrolador y las funciones DSP con un único conjunto de instrucciones y archivo de registros.
"Cuenta con (desde 30) MIPS que ofrece el rendimiento de un DSP con la simplicidad de un MCU"
Los Controladores Digitales de Señales (DSCs) de Microchip se comercializan en más de medio centenar de modelos diferentes de las familias dsPIC30F y dsPIC33F y consisten en la combinación de los microcontroladores de 16 bits con los recursos necesarios para soportar las funciones clásicas de los DSP.
dato: Los dsPIC nacen después de que los DSP hayan sido desarrollados durante años por otras empresas aprovechando la experiencia acumulada por otros fabricantes.
*En segundo lugar vamos a empezar con la estructura de programación que se utiliza.
Toda programación se va hacer en el IDE oficial de Microchip que esMPLABX3.0 y el compilar XC16(para microntroladores de 16 bits) http://www.microchip.com/mplab/mplab-x-ide ,una vez abierto la pagina darle click en la pestaña download (para descargar el mplabx3.0) y download archive(para descargar el compilador xc16),una vez descargado e instalado estamos listos para empezar a codear.
Estructura de un programa para DsPic
/*
* File: main_PLed.c
* Author: jhon ore
* Created on 30 de junio de 2016, 16:56
*/
(*).....
#pragma config PWMPIN = ON
#pragma config HPOL = ON
#pragma config LPOL = ON
#pragma config ALTI2C = OFF
#pragma config FPWRT = PWR128
int main(void) {
(**).....
while (1) {
(***).....
}
return 0;
}
Notas: 1.-Configuración de fuses. (*).-Antes del programa principal,es fundamental saber configurar estos fuses para poder garantizar el buen funcionamiento del dspic.
2.-Aquí solamente va a ocurrir una sola vez. (**).-Aquí va todo las configuraciones y llamados de funciones configuración de I/O,módulos del dspic (UART,ADc,QEI,TIMER,INT etc.) llamado de funciones creados por nuestros propios medios para que se nos facilite la programación.
3.-Aquí va a ocurrir todo el tiempo. (***).-Aquí va todo lo que siempre se va a querer repetir,por ejemplo un prende led o eventos que quieren que ocurran repetidamente.
Siempre se va a empezar con un comentario que es opcional-->luego se configura los fuses del dspic a usar-->luego se empieza con un funciónmain,ahí dentro se ejecutara todo el programa,después de pasar por el while,la función retorna a cero.
.-la plantilla anterior siempre se usa en los programa de microcontroladores de microchip.
#define MIPS 40 //MIPS deseados (máximo 40 para el dspic33fj32mc204)
#define crystal 16 //valor del cristal en MHZ
#define FCY MIPS*1000000 //frecuencia de instrucción 40Mips
#define delay_ms(x) __delay32((FCY/1000)*x) //delay en milisegundos
#define delay_us(x) __delay32(MIPS*x) //delay en microsegundos
//4.-
void config_clk_HSPLL(void);//funcion para elevar a 40 mips
//5.-
int main(void) {
AD1PCFGL = 0xFFFF;//configuración de todas las salidas digitales
config_clk_HSPLL();//llamando a la función configuración
_TRISA0 = 0; //Configurando A0 como salida
_LATA0 = 0; //se inicia en apagado
while (1) {
_LATA0 = ~_LATA0;//para hacer el prendido y apagado del led.
delay_ms(500);//tiempo de encendido y apagado.
}
return 0;
}
//6.-
void config_clk_HSPLL(void) {//funciona de configuración de velocidad del dspic
int M = MIPS * 8 / crystal; //tranformacion ppara optener el valor M
PLLFBD = M - 2; // M = 28
CLKDIVbits.PLLPRE = 0; // N1 = 2
CLKDIVbits.PLLPOST = 0; // N2 = 2
while (_LOCK == 0);
}
Diagrama esquemático-Proteus:
Explicación del código:
1.-incluimos librerías únicos del xc16 y de C.
2.-configuramos los fuses de acuerdo con el datasheet del dspic a usar.
3.-hacemos unos define para nuestra fácil programación:
#defineMIPS 40 //velocidad del dspic es de 40Mhz o 40MIPS
#define crystal 16 //valor del cristal en MHz externo
#define FCY MIPS*1000000 //frecuencia de instrucción 40Mips
#define delay_ms(x) __delay32((FCY/1000)*x) //delay en milisegundos
#define delay_us(x) __delay32(MIPS*x) //delay en microsegundos
4.- se hace el nombramiento dela función (void config_clk_HSPLL(void)).
5.- entramos a la función main.
6.-creación de nuestra función.Esta función es la encargada de elevar la velocidad del dspic a 40Mips,es decir, si estamos usando como en este caso un cristal de 16Mhz,no dara una velocidad de 16/2=8Mhz,para nuestro uso es muy poco,por ese motivo lo elevamos,en vez de tener una velocidad de 8MHz ,elevando vamos a tener una velocidad de 40MHz.
Ahora la pregunta es ¿De donde salio los valores de M , N1 y N2?
Para nuestro caso salieron del datasheet del dspic en la secciónOSCILLATOR CONFIGURATION.
Nota:si gustan siempre usen la funcion void config_clk_HSPLL(void),si quieren menos velocidad,solo tienes que cambiar el valor del #define MIPS 40 y el #define crystal 16 al valor que quieran utilizar,por ejemplo.
Quiero una velocidad de 20 Mips y estoy utilizando un crystal de 8 MHz externo.